Introduction to Neural Networks
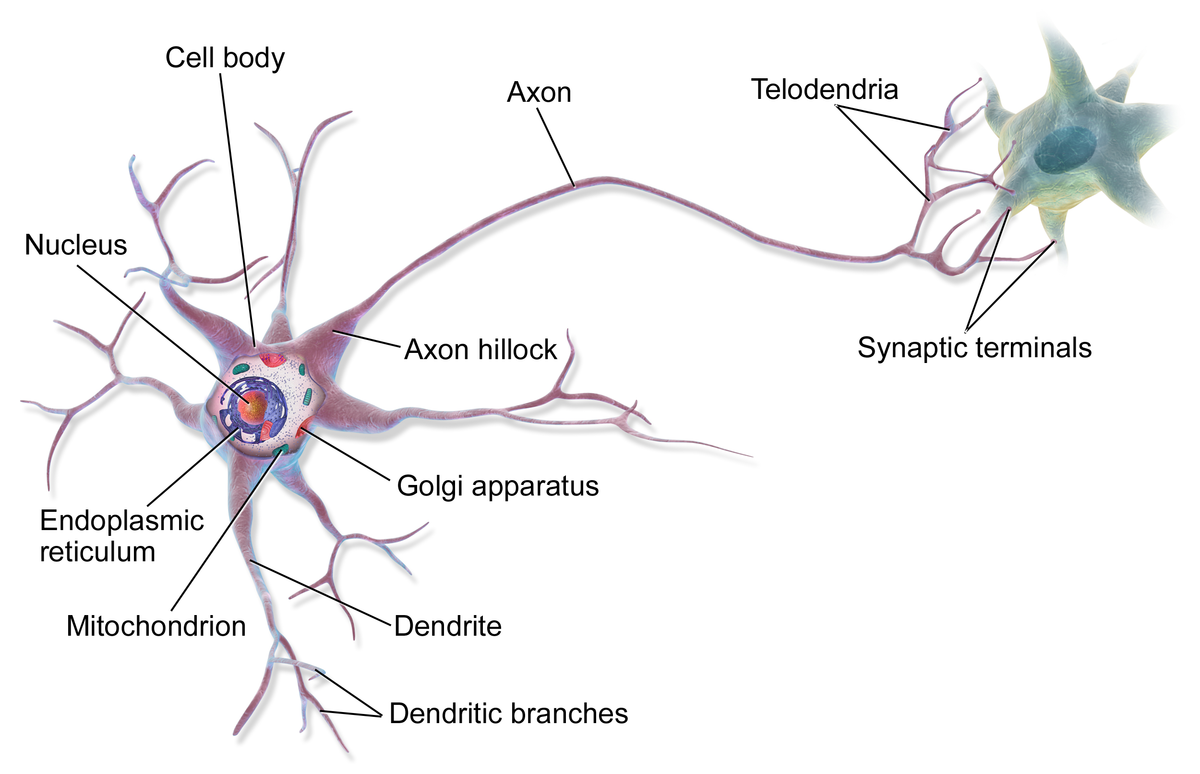
Neural networks are computational models inspired by the human brain's interconnected network of neurons.
- Consist of layers of interconnected nodes called neurons .
- Each neuron processes input and passes the output to the next layer.
- Capable of learning complex patterns from data.
- Used in various domains like computer vision, natural language processing, and more.
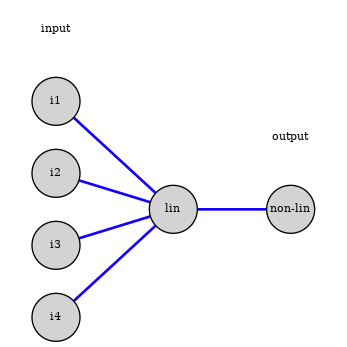
Artificial Neuron Model
A modern neuron in a neural network performs two main operations:
- Linear Combination: Computes a weighted sum of inputs.
- Non-linear Activation: Applies an activation function to introduce non-linearity.
Mathematically:
$$ z = w_0 + \sum_{i=1}^{n} w_i x_i $$
$$ \text{output} = \phi(z) $$
where $\phi(z)$ is the activation function.
Mathematical Formulation of the Perceptron
Mathematically, the perceptron computes:
$$ z = w_0 + \vec{w} \cdot \vec{x} $$
$$ \text{output} = \phi(z) $$
where:
- $\vec{x}$ = input vector.
- $\vec{w}$ = weight vector.
- $w_0$ = bias term.
- $\phi(z)$ = activation function (e.g., step function).
The perceptron learning rule updates weights based on the error:
$$ w_j \leftarrow w_j + \eta (y - \hat{y}) x_j $$
where:
- $\eta$ = learning rate.
- $y$ = true label.
- $\hat{y}$ = predicted label.
Limitations of the Perceptron
The perceptron has significant limitations:
- Can only solve linearly separable problems.
- Cannot model complex, non-linear decision boundaries (e.g., XOR problem).
- Limited representational capacity.
- Led to the development of multi-layer networks to overcome these limitations.

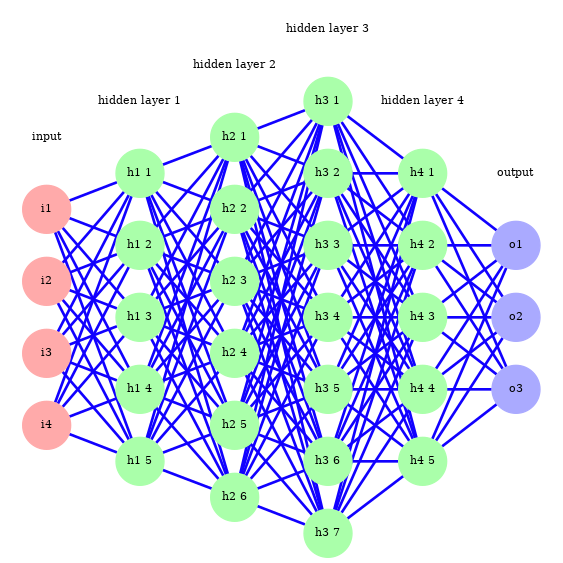
Deep Learning
Networks with a large number of layers are referred to as deep learning .
Advantages:
- Can learn hierarchical representations.
- Effective in processing high-dimensional data like images, speech, and text.
Challenges:
- Require large amounts of data.
- Computationally intensive training.
- Potential for overfitting.
Advances in hardware (GPUs, TPUs) and algorithms (e.g., optimization techniques) have made deep learning feasible.
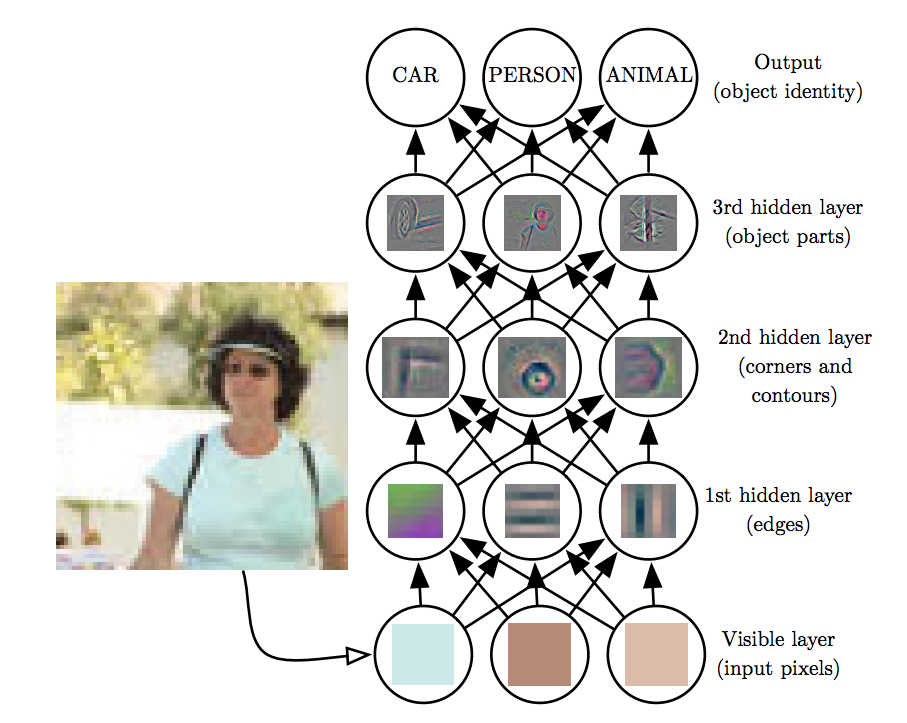
Deep Learning and Hierarchical Feature Learning
Deep learning leverages multiple layers to learn hierarchical representations:
- Lower Layers: Capture simple features like edges or textures.
- Middle Layers: Combine simple features to form more complex patterns.
- Higher Layers: Abstract high-level concepts relevant to the task.
This hierarchy enables neural networks to automatically learn features from raw data.
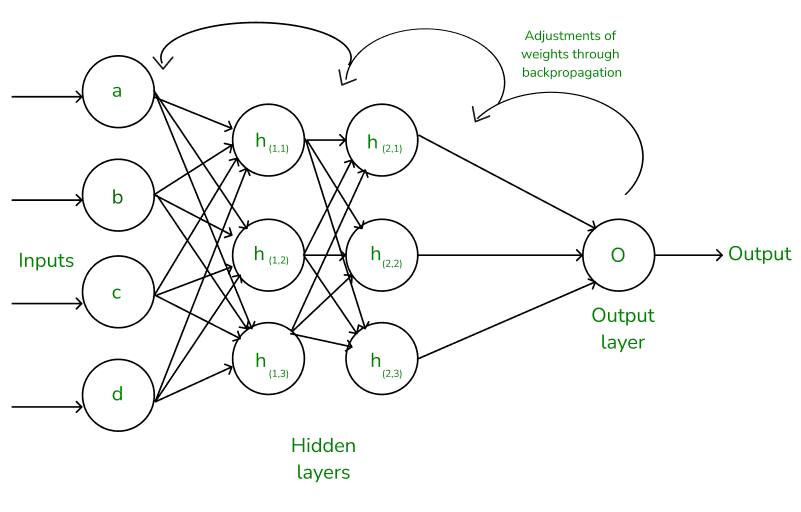
Training Neural Networks
Training involves adjusting weights to minimize a loss function:
- Initialize weights randomly or using specific initialization methods.
- Perform a forward pass to compute the output.
- Calculate the loss using a suitable loss function.
- Compute gradients via backpropagation.
- Update weights using an optimization algorithm.
- Repeat the process for multiple epochs.
Key concepts:
- Epoch: One complete pass through the training dataset.
- Batch Size: Number of samples processed before updating weights.
- Learning Rate: Controls the step size during weight updates.
Training Neural Networks
Training involves adjusting weights to minimize a loss function:
- Initialize weights randomly or using specific initialization methods.
- Perform a forward pass to compute the output.
- Calculate the loss using a suitable loss function.
- Compute gradients via backpropagation.
- Update weights using an optimization algorithm.
- Repeat the process for multiple epochs.
Weight Initialization Techniques
Proper weight initialization can help in faster convergence:
- Zero Initialization: Not recommended as it causes symmetry.
- Random Initialization: Small random values from a normal or uniform distribution.
- Xavier Initialization: Scales weights based on the number of input and output neurons.
- He Initialization: Similar to Xavier but designed for ReLU activation functions.
Avoiding vanishing or exploding gradients through appropriate initialization.
Training Neural Networks
Training involves adjusting weights to minimize a loss function:
- Initialize weights randomly or using specific initialization methods.
- a forward pass to compute the output.
- Calculate the loss using a suitable loss function.
- Compute gradients via backpropagation.
- Update weights using an optimization algorithm.
- Repeat the process for multiple epochs.
Feedforward Process
The feedforward process involves propagating inputs through the network to generate an output.
- Input data is presented to the input layer.
- Each neuron computes a weighted sum of its inputs and applies an activation function.
- The outputs of one layer become the inputs to the next layer.
- The final output layer produces the network's prediction.
This process is used during both training and inference phases.
Feedforward Process
Activation Functions
Activation functions introduce non-linearity into the neural network, allowing it to learn complex patterns.
Common activation functions include:
- Step Function
- Sigmoid Function
- Tanh Function
- ReLU (Rectified Linear Unit)
- Leaky ReLU
- ELU (Exponential Linear Unit)
- Softmax Function
Selection of activation functions can significantly impact the network's performance.
Activation Functions
- Formula:
$$\phi(x) = \max(0, x)$$
- Characteristics:
- Outputs zero for negative inputs and linear for positive inputs.
- Simple and computationally efficient.
- Helps mitigate vanishing gradient problems.
- Can suffer from "dying ReLUs" where neurons stop activating.
Advanced Activation Functions
- Leaky ReLU
- Formula:
$$\phi(x) = \begin{cases} x & \text{if } x \geq 0 \\ \alpha x & \text{if } x < 0 \end{cases}$$
Typically, \( \alpha \) is a small constant like 0.01. - Characteristics:
- Allows a small, non-zero gradient when \( x < 0 \).
- Addresses the "dying ReLU" problem.
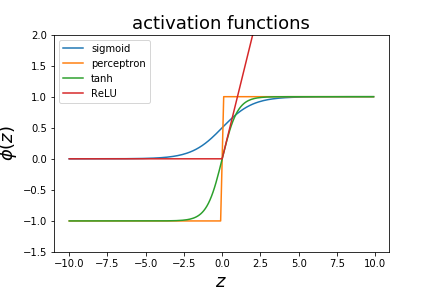
Non-linear activation functions¶
There are different decision functions that can be used.
- the perceptron used a step function
- logistic regression uses the sigmoid function
- one can also use $\phi(z)=tanh(z)$ as a decision function
- various variations on the hinge function (ReLU)
Training Neural Networks
Training involves adjusting weights to minimize a loss function:
- Initialize weights randomly or using specific initialization methods.
- Perform a forward pass to compute the output.
- Calculate the loss using a suitable loss function.
- Compute gradients via backpropagation.
- Update weights using an optimization algorithm.
- Repeat the process for multiple epochs.
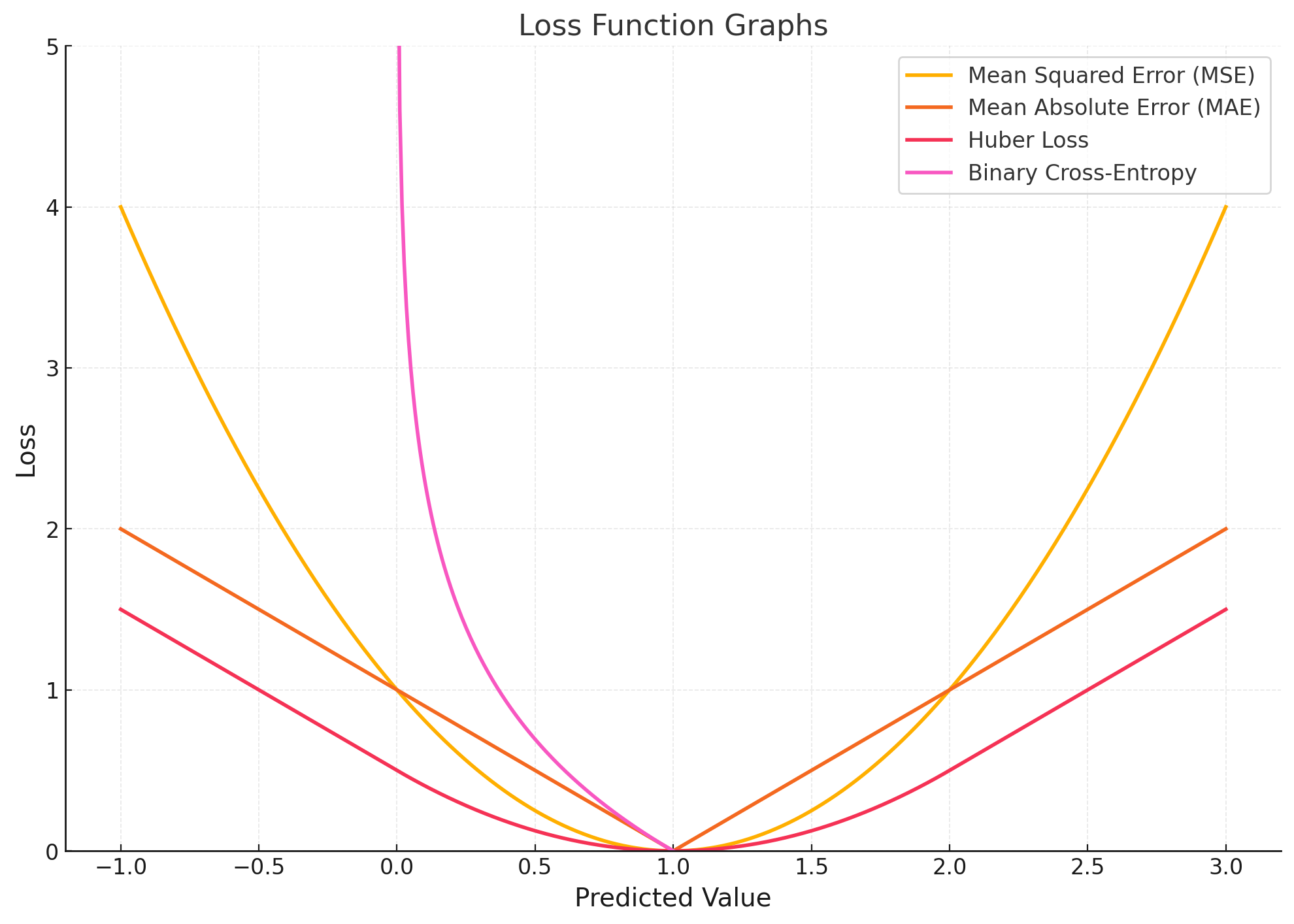
Loss Functions
Loss functions quantify the difference between the predicted output of the network and the true output. They are crucial for training neural networks using backpropagation.
Common loss functions include:
- Mean Squared Error (MSE)
- Mean Absolute Error (MAE)
- Binary Cross-Entropy Loss (Log Loss)
- Categorical Cross-Entropy Loss
- Hinge Loss
- Kullback-Leibler Divergence Loss (KL Divergence)
Loss Functions
- Mean Squared Error (MSE)
- Formula:
$$L_{\text{MSE}} = \frac{1}{n} \sum_{i=1}^{n} (y_i - \hat{y}_i)^2$$
- Explanation:
- \( y_i \): True value.
- \( \hat{y}_i \): Predicted value.
- Measures the average squared difference between predictions and actual values.
- Usage:
- Commonly used in regression problems.
- Penalizes larger errors more than smaller ones.
- Formula:
Loss Functions
- Formula:
$$L_{\text{MAE}} = \frac{1}{n} \sum_{i=1}^{n} |y_i - \hat{y}_i|$$
- Explanation:
- Measures the average absolute difference between predictions and actual values.
- Usage:
- Used in regression problems where outliers are less significant.
- Less sensitive to outliers compared to MSE.
Loss Functions
- Formula:
$$L_{\text{Binary}} = -\frac{1}{n} \sum_{i=1}^{n} [ y_i \log(\hat{y}_i) + (1 - y_i) \log(1 - \hat{y}_i) ]$$
- Explanation:
- Used for binary classification tasks.
- Penalizes the divergence between predicted probabilities and actual labels.
- Usage:
- Applicable when outputs are probabilities (using sigmoid activation in the output layer).
Loss Functions
- Formula:
$$L_{\text{Categorical}} = -\sum_{i=1}^{n} \sum_{k=1}^{K} y_{i,k} \log(\hat{y}_{i,k})$$
- Explanation:
- \( y_{i,k} \): Binary indicator (0 or 1) if class label \( k \) is the correct classification for sample \( i \).
- \( \hat{y}_{i,k} \): Predicted probability that sample \( i \) is of class \( k \).
- Used for multi-class classification tasks.
- Usage:
- Often used with softmax activation in the output layer.
Loss Functions
- Formula:
$$L_{\text{Hinge}} = \frac{1}{n} \sum_{i=1}^{n} \max(0, 1 - y_i \hat{y}_i)$$
- Explanation:
- Used primarily for "maximum-margin" classification, especially with support vector machines.
- \( y_i \) should be -1 or 1, representing class labels.
- Usage:
- Can be used in neural networks for binary classification.
Loss Functions
- Formula:
$$L_{\text{KL}} = \sum_{i=1}^{n} y_i \log\left( \frac{y_i}{\hat{y}_i} \right)$$
- Explanation:
- Measures how one probability distribution diverges from a second, expected probability distribution.
- Usage:
- Used in applications like variational autoencoders.
Loss Functions
Role in Backpropagation:
- The loss function calculates the error between the network's predictions and the true values.
- The computed loss is then used to calculate gradients during backpropagation.
- The gradients are propagated backward through the network to update the weights.
Understanding and selecting the appropriate loss function is critical for effective training of neural networks.
Training Neural Networks
Training involves adjusting weights to minimize a loss function:
- Initialize weights randomly or using specific initialization methods.
- Perform a forward pass to compute the output.
- Calculate the loss using a suitable loss function.
- Compute gradients via backpropagation.
- Update weights using an optimization algorithm.
- Repeat the process for multiple epochs.
Training Neural Networks
Training involves adjusting weights to minimize a loss function:
- Initialize weights randomly or using specific initialization methods.
- Perform a forward pass to compute the output.
- Calculate the loss using a suitable loss function.
- Compute gradients via backpropagation.
- Update weights using an optimization algorithm.
- Repeat the process for multiple epochs.
Gradient Descent
Gradient descent is the optimization algorithm used to minimize the loss function.
Update rule:
$$ w_{ij} = w_{ij} - \eta \frac{\partial J}{\partial w_{ij}} $$
where:
- $\eta$ = learning rate.
- $\frac{\partial J}{\partial w_{ij}}$ = gradient of the loss with respect to weight $w_{ij}$.
Variants:
- Batch Gradient Descent
- Stochastic Gradient Descent (SGD)
- Mini-Batch Gradient Descent
Optimization Algorithms
Various optimization algorithms improve training efficiency and convergence:
- Stochastic Gradient Descent (SGD): Updates weights using individual samples.
- Momentum: Accelerates SGD by considering past gradients.
- Adagrad: Adapts learning rate based on past gradients.
Choice of optimizer can significantly affect training performance.
Optimization Algorithms
Various optimization algorithms improve training efficiency and convergence:
- Stochastic Gradient Descent (SGD)
- Update Rule:
$$w_{t+1} = w_t - \eta \nabla L(w_t; x_i, y_i)$$
- Explanation:
- Updates weights using individual samples \( (x_i, y_i) \).
- \( \eta \) is the learning rate.
- \( \nabla L(w_t; x_i, y_i) \) is the gradient of the loss function at time \( t \).
- Characteristics:
- Introduces noise due to sampling, which can help escape local minima.
- Can be slow to converge near minima.
- Update Rule:
Optimization Algorithms
- Update Rule:
$$\begin{align*} v_{t} & = \gamma v_{t-1} + \eta \nabla L(w_t) \\ w_{t+1} & = w_t - v_{t} \end{align*}$$
- Explanation:
- \( v_t \) is the velocity (accumulated gradient).
- \( \gamma \) is the momentum coefficient (typically between 0 and 1).
- Accelerates SGD by smoothing gradients over time.
- Characteristics:
- Helps navigate ravines in the loss surface.
- Can overshoot minima if \( \gamma \) is too high.
Optimization Algorithms
- Update Rule:
$$\begin{align*} G_t & = G_{t-1} + \nabla L(w_t)^2 \\ w_{t+1} & = w_t - \frac{\eta}{\sqrt{G_t + \epsilon}} \nabla L(w_t) \end{align*}$$
- Explanation:
- \( G_t \) is the sum of the squares of past gradients (element-wise).
- \( \epsilon \) is a small constant to prevent division by zero (e.g., \( 10^{-8} \)).
- Adapts the learning rate for each parameter individually.
- Characteristics:
- Good for sparse data.
- Learning rate diminishes over time, which can halt training prematurely.
Training Neural Networks
Training involves adjusting weights to minimize a loss function:
- Initialize weights randomly or using specific initialization methods.
- Perform a forward pass to compute the output.
- Calculate the loss using a suitable loss function.
- Compute gradients via backpropagation.
- Update weights using an optimization algorithm.
- Repeat the process for multiple epochs.
Challenges in Training Deep Networks
Deep networks introduce specific challenges:
- Vanishing Gradients: Gradients become very small, slowing down learning.
- Exploding Gradients: Gradients grow exponentially, causing instability.
- Overfitting: Model performs well on training data but poorly on unseen data.
- Computational Complexity: Increased number of parameters requires more computational resources.
Strategies to mitigate these issues include activation function choices, gradient clipping, and regularization.
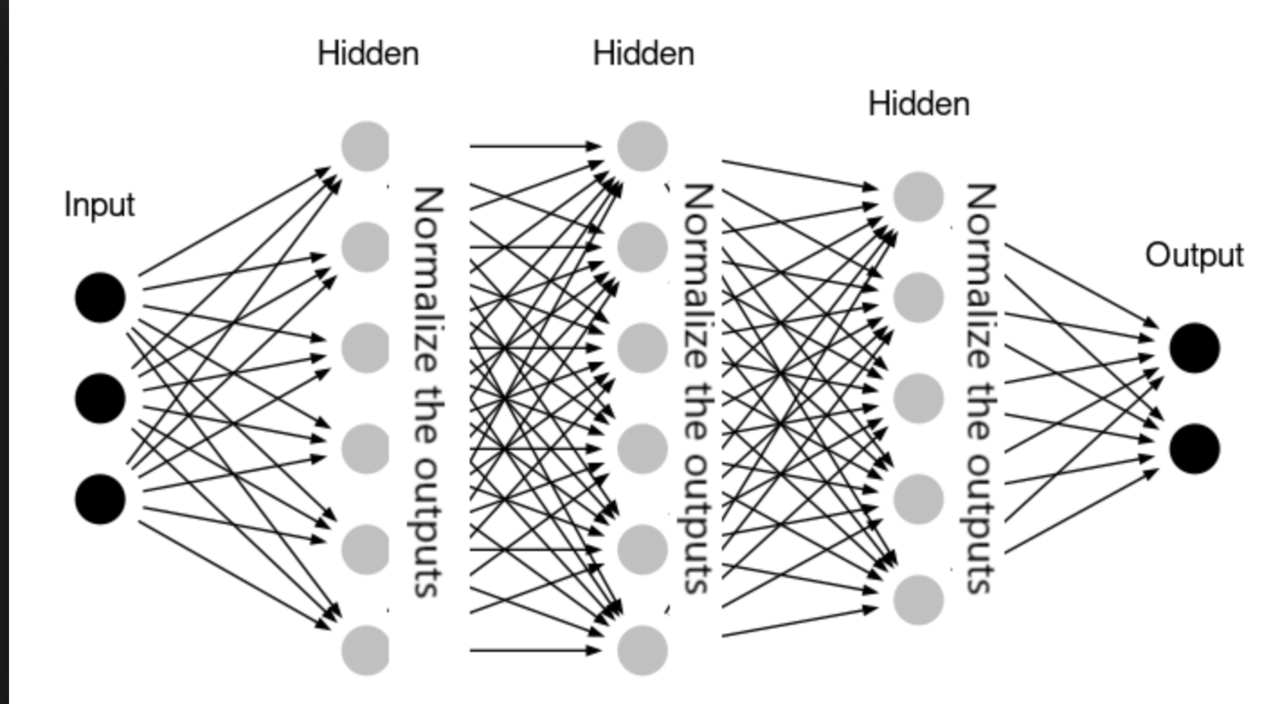
Batch Normalization
Batch normalization is a technique to improve training speed and stability:
- Normalizes the input of each layer to have zero mean and unit variance.
- Reduces internal covariate shift.
- Allows for higher learning rates.
- Acts as a form of regularization.
Introduced by Sergey Ioffe and Christian Szegedy in 2015.
Regularization Techniques
To prevent overfitting, we use regularization methods:
- L1 and L2 Regularization: Add penalty terms to the loss function.
- Dropout: Randomly drop units during training to prevent co-adaptation.
- Early Stopping: Stop training when validation loss starts to increase.
- Data Augmentation: Increase the size of the training data by transformations.
- Ensemble Methods: Combine multiple models to improve generalization.
Regularization helps in building models that generalize well to new data.
Practical Considerations
Important aspects to consider when working with neural networks:
- Hyperparameter Tuning: Selecting learning rates, batch sizes, number of layers, etc.
- Data Preprocessing: Normalization, scaling, and handling missing data.
- Hardware Acceleration: Utilizing GPUs and TPUs for faster computation.
- Frameworks and Libraries: TensorFlow, PyTorch, Keras, etc.
- Model Interpretability: Understanding and explaining model decisions.
These factors can significantly impact the performance and usability of neural network models.
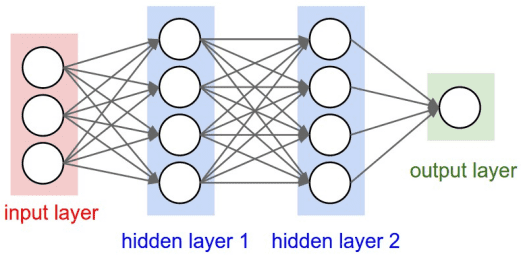
Network Architectures
Neural networks are constructed by connecting artificial neurons in various configurations.
Types of network architectures:
- Feedforward Neural Networks: Information moves only in one direction, from input to output.
- Convolutional Neural Networks (CNNs): Specialized for processing grid-like data such as images.
- Recurrent Neural Networks (RNNs): Designed for sequential data, with loops to allow information to persist.
- Autoencoders: Used for unsupervised learning of efficient codings.
- Generative Adversarial Networks (GANs): Consist of generator and discriminator networks for data generation.
- Transformer Networks: Utilize self-attention mechanisms, prominent in NLP tasks.
Each architecture is tailored for specific types of data and tasks.
Advanced Topics in Deep Learning
Exploring cutting-edge developments in deep learning:
- Attention Mechanisms: Allow models to focus on specific parts of the input.
- Transfer Learning: Leveraging pre-trained models for new tasks.
- Generative Models: GANs and Variational Autoencoders (VAEs).
- Self-Supervised Learning: Learning representations from unlabeled data.
- Reinforcement Learning: Training agents to make decisions through rewards.
These topics represent the forefront of research and applications in deep learning.
Examples and Applications
Neural networks are used in various fields:
- Computer Vision: Image classification, object detection, image segmentation.
- Natural Language Processing: Language translation, sentiment analysis, question answering.
- Speech Recognition: Voice assistants, transcription services, speech synthesis.
- Healthcare: Disease prediction, medical image analysis, personalized medicine.
- Finance: Fraud detection, stock price prediction, algorithmic trading.
- Autonomous Vehicles: Perception, decision-making, and control systems.
These applications showcase the versatility and impact of neural networks.
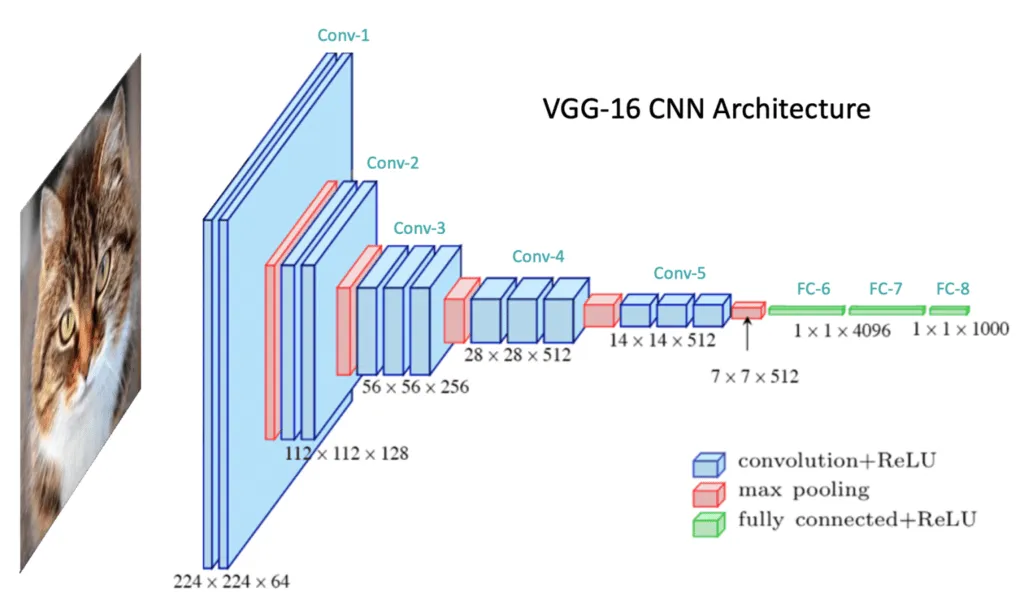
Case Study: Convolutional Neural Networks
Understanding CNNs through image classification tasks:
- Convolution Layers: Extract spatial features using filters.
- Pooling Layers: Reduce spatial dimensions and control overfitting.
- Fully Connected Layers: Perform classification based on extracted features.
- Applications: Used in models like AlexNet, VGGNet, ResNet.
Conclusion
Neural networks are powerful tools for modeling complex patterns in data.
Key takeaways:
- They consist of interconnected neurons with activation functions.
- Can model non-linear relationships using hidden layers.
- Training involves feedforward and backpropagation processes.
- Regularization is essential to prevent overfitting.
- They have widespread applications across various domains.
- Continuous advancements are expanding their capabilities.
Understanding the fundamentals allows for further exploration into advanced topics.
Thank you for your attention!
Variance Bias Trade-off¶
What is Bias and Variance?
Bias: The error introduced by approximating a real-world problem, which may be complex, by a much simpler model.
- High bias can cause an algorithm to miss relevant relations between features and target outputs (underfitting).
Variance: The error introduced by the model's sensitivity to fluctuations in the training set.
- High variance can cause overfitting, where the model captures noise in the data.
Let's suppose the relationship between $X$ and $Y$ is described by
$$ Y = \sum_i w_i^\star x^i + \epsilon$$
where $w_i^\star$ are the true parameters and $\epsilon$ is some noise.
We will try to model this with
$$ y = p(x) = \sum_i w_i x^i$$
where now the $w_i$ will be fitted to data.
We define
$$ \bar w_i = \langle w_i\rangle $$
as the expectation value of the parameter $w_i$ when fitted to multiple independent samples drawn from the true distribution.
We want to calculate the expected deviation of the fitted coefficients form the true coefficient:
$$ \langle (w_i-w_i^\star)^2\rangle$$
$$ \begin{eqnarray} \langle (w_i-w_i^\star)^2\rangle & = & \langle (w_i-\bar w_i +\bar w_i -w_i^\star)^2\rangle \\ &=& \langle (w_i-\bar w_i)^2\rangle + \langle (\bar w_i-w_i^\star)^2\rangle +2 \langle (w_i-\bar w_i)(\bar w_i -w_i^\star)\rangle \end{eqnarray}$$
The third term vanishes: $$ \langle (w_i-\bar w_i)(\bar w_i -w_i^\star)\rangle = \langle (w_i-\bar w_i)\rangle (\bar w_i -w_i^\star) =0 $$
So we have
$$ \langle (w_i-w_i^\star)^2\rangle = \langle (w_i-\bar w_i)^2\rangle + \langle (\bar w_i-w_i^\star)^2\rangle$$
The first term is the variance term and the second is the bias.
Example¶
To illustrate the variance-bias tradeoff we will be using different models to describe data with true relationship between the input $x$ and the outcome
$$Y(x) = 1+\frac15 x^2 + \epsilon \qquad \mbox{for}\qquad 0\leq x\leq 1\;, \quad 0 \; \mbox{otherwise}$$
Where $\epsilon$ is a gaussian noise. We will use the two models
$$ m_1(x) = a +bx$$
and
$$m_2(x)= a+bx +cx^2 +dx^3.$$
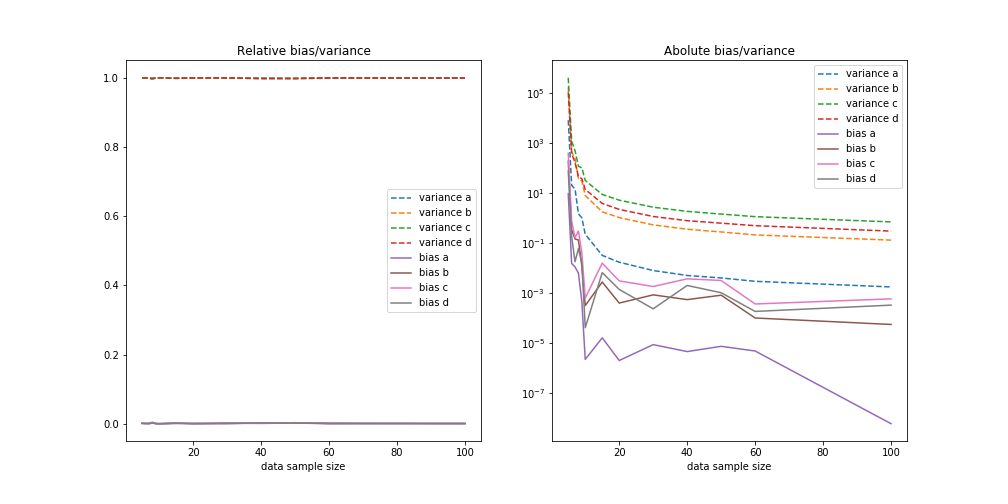
Using $m_1$, a model with too few parameters we get
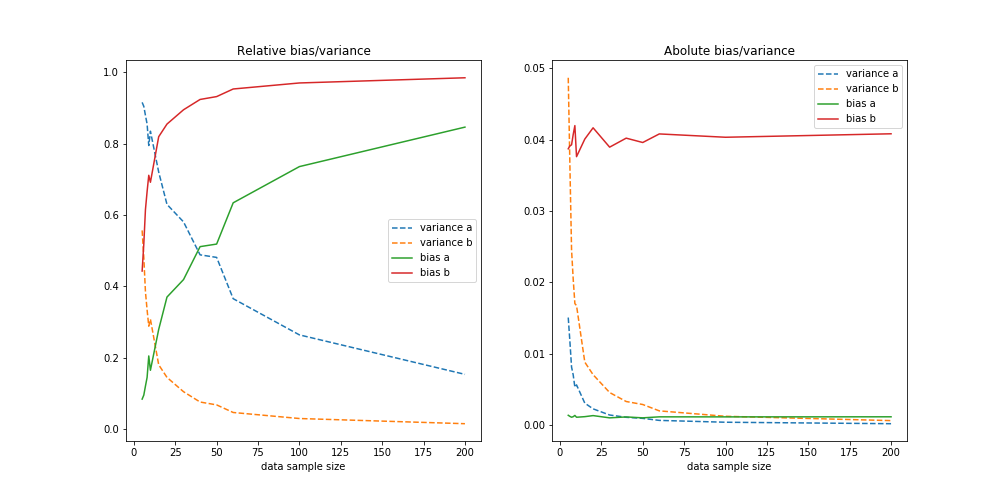
For low dataset size we see the the variance dominates but as the number of training samples grows the bias dominates. Since the model is not capable of describing the truth the error is not diminishing even though the variance part of the error drops proportional to $1/\sqrt{N}$
For the second model where we have enough freedom to exactly describe the truth we get: